publications
2026
- CVPR’26
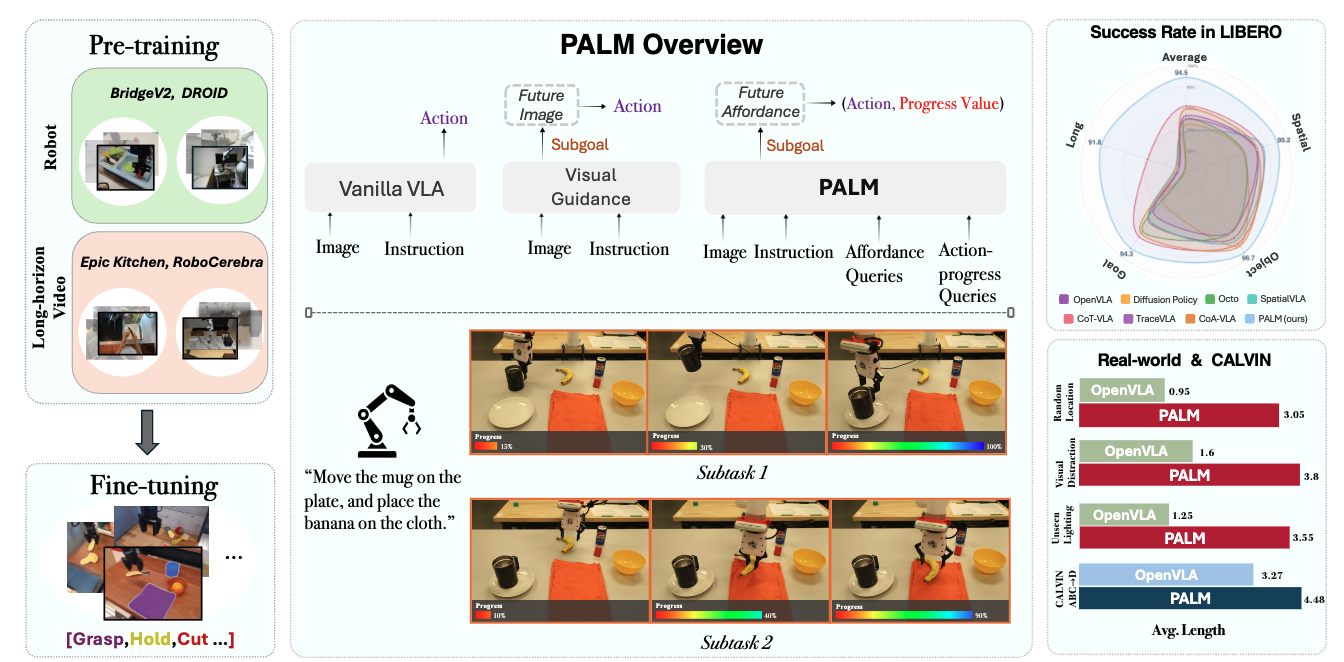 PALM: Progress-Aware Policy Learning via Affordance Reasoning for Long-Horizon Robotic ManipulationIn IEEE Conference on Computer Vision and Pattern Recognition, 2026
PALM: Progress-Aware Policy Learning via Affordance Reasoning for Long-Horizon Robotic ManipulationIn IEEE Conference on Computer Vision and Pattern Recognition, 2026 - Preprint
- Preprint
- Preprint
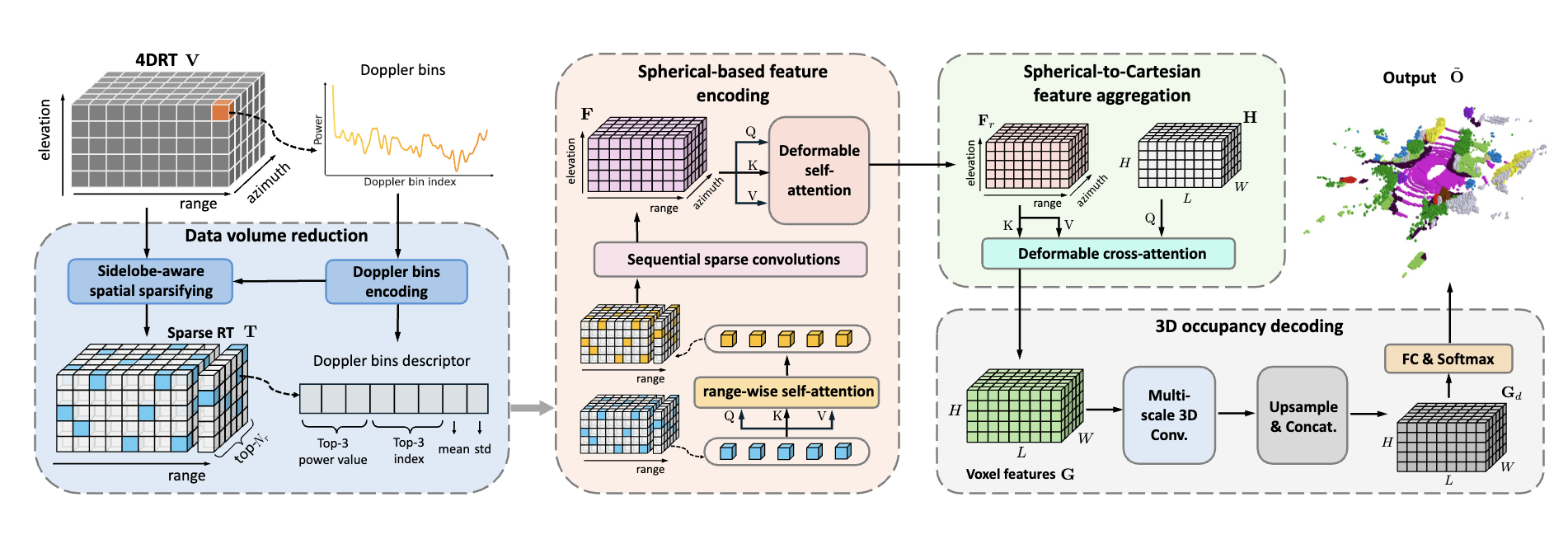
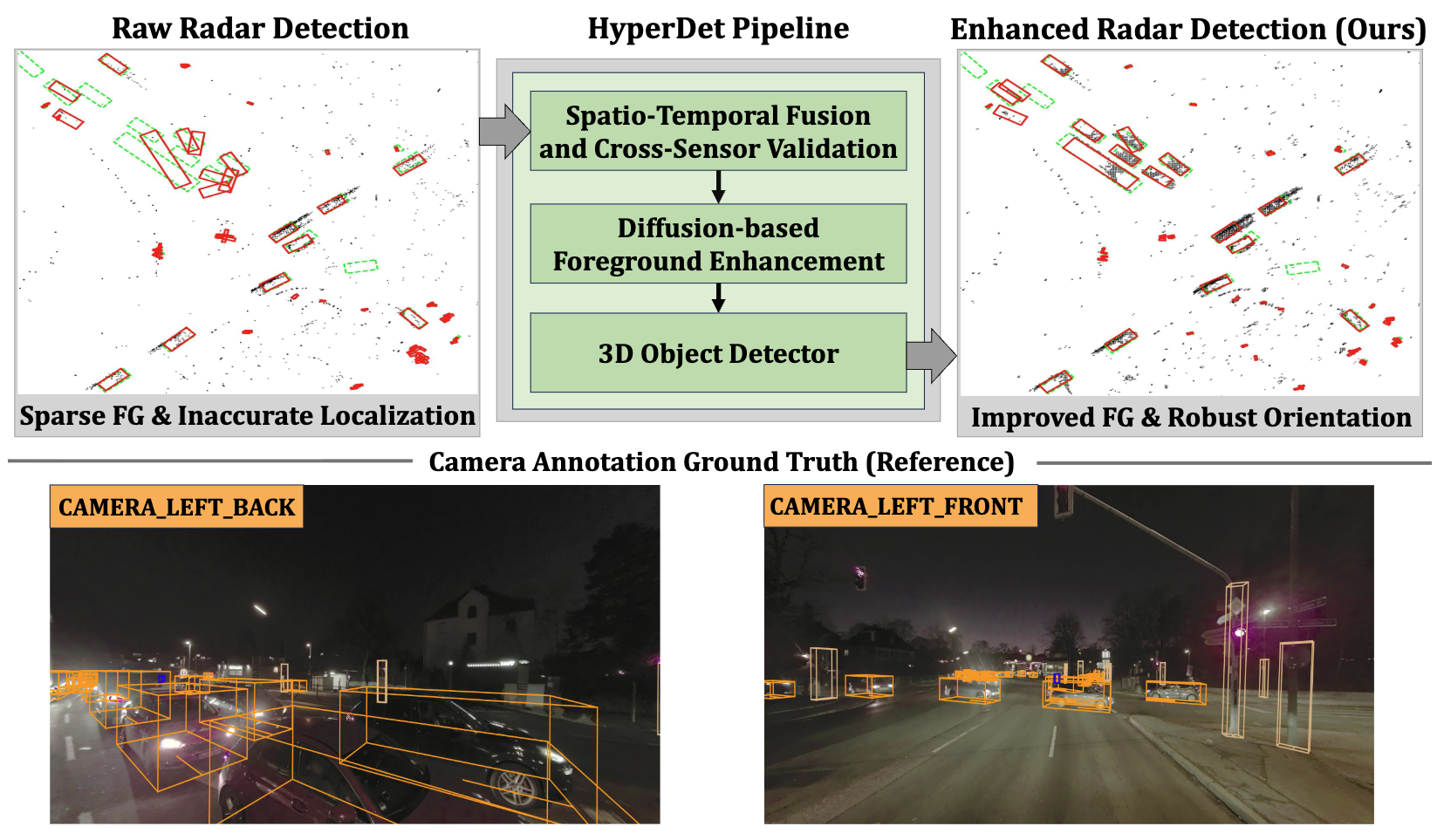
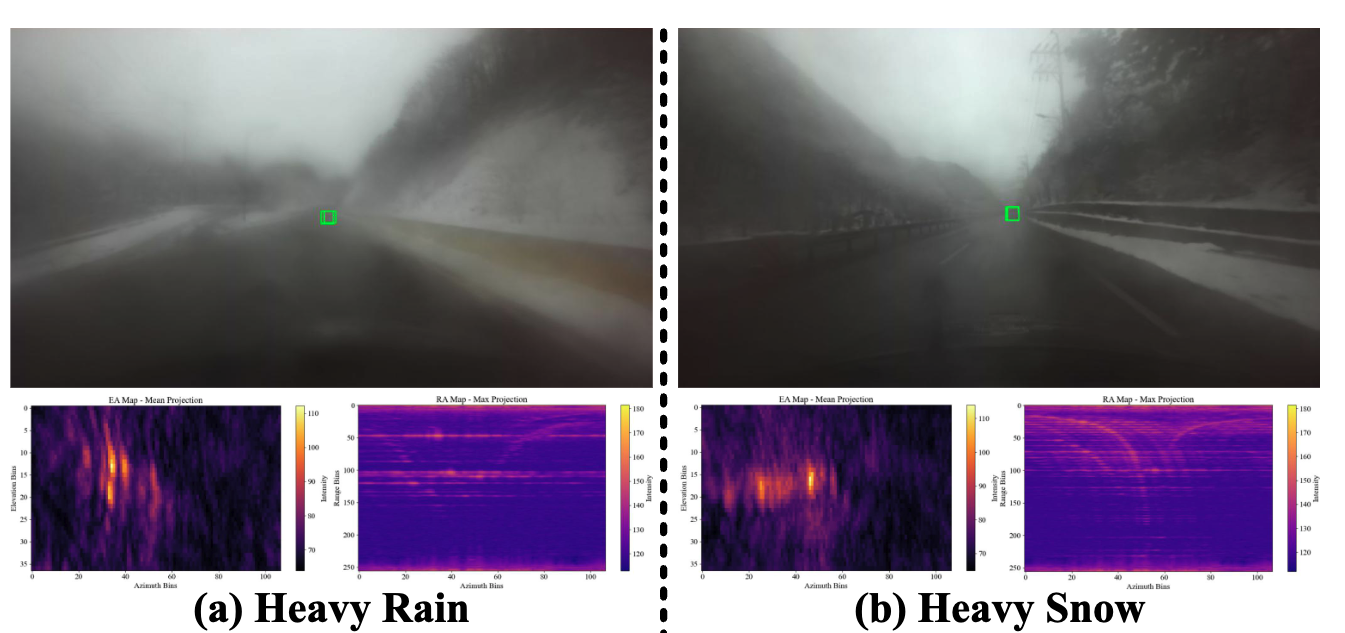 Wavelet-based Multi-View Fusion of 4D Radar Tensor and Camera for Robust 3D Object DetectionUnder Review, 2026
Wavelet-based Multi-View Fusion of 4D Radar Tensor and Camera for Robust 3D Object DetectionUnder Review, 2026
2025
- TASE
 Dexterous Manipulation through Imitation Learning: A SurveyIEEE Transactions on Automation Science and Engineering, 2025
Dexterous Manipulation through Imitation Learning: A SurveyIEEE Transactions on Automation Science and Engineering, 2025